
Ugur
Gokus
Home
Ford Trucks Guided Autonomous HMI
Level3+ Autonomous
Elektrobit EBGUIDE integration
Driver safety
Overview
Professional truck drivers often hesitate to use higher levels of autonomy, especially on unfamiliar routes. The challenge was not the lack of technology, but the lack of trust and predictability. I worked on the interaction design decisions around autonomy feedback, predictability, and driver trust calibration.The visuals and descriptions below have been presented in a generalized manner due to a Non-Disclosure Agreement (NDA).
FORD Fmax HMI
2021 - 2022
My Contribution
Design of UI & interaction animations, interface prototyping, user interviews, and user testing
Project Overview
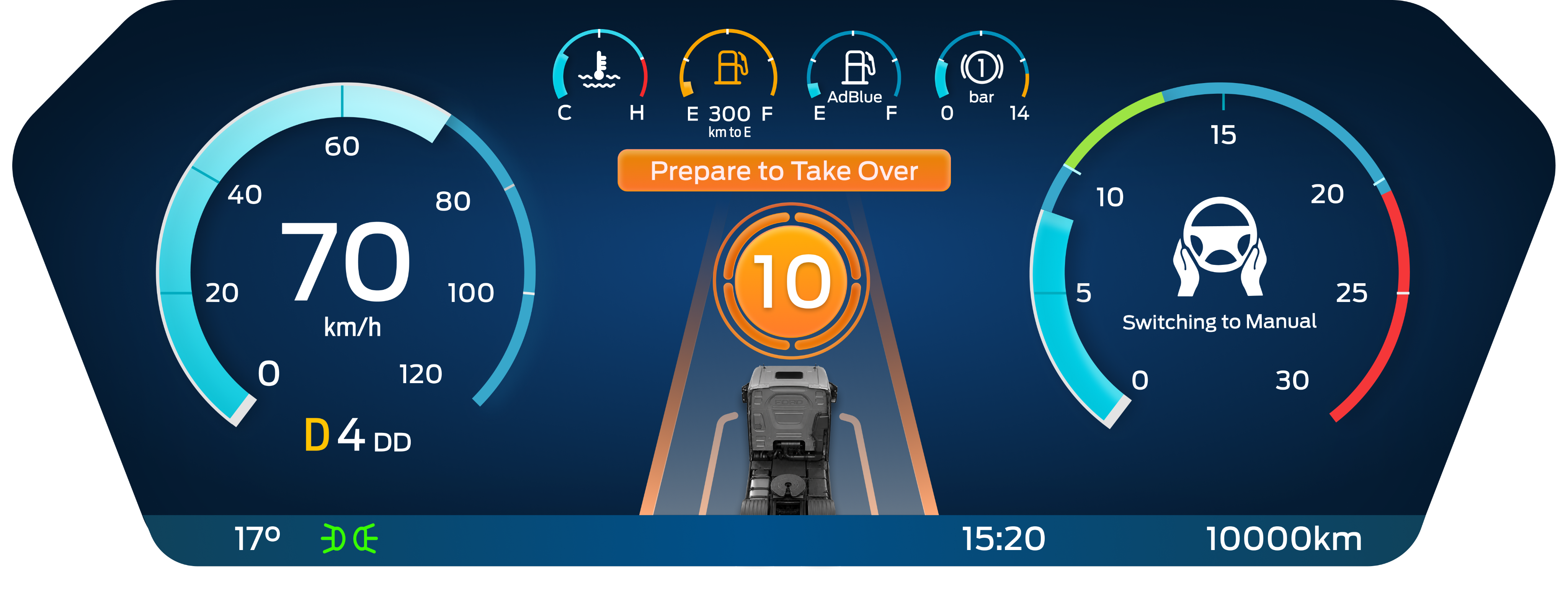
This project aimed to develop the instrument panel display based on users' perceptions of safety and how displays behave in Level 3 and Level 3+ autonomous driving in Ford trucks.
Duration
12 months




Research
I participated in interviews with truck drivers alongside the Ford UX team in order to understand their driving habits, differences, and expectations. As a team, we identified specific assumptions and transformed them into targeted questions related to autonomous driving, allowing us to obtain accurate and meaningful insights.

Dashboard Interaction Development
Based on the insights gathered from drivers, I developed the dashboard information architecture around the drivers’ mental models and decision-making processes. In particular, I defined how the dashboard should behave across different ADAS levels and in edge-case scenarios, working closely with the autonomous driving engineering team.

UI development process
Collaborated closely with the Ford Brand team to design and evolve UI components within the design system, contributing new tokens, components, and visual patterns. Defined motion behaviors and animation specifications for autonomous driving states and vehicle status notifications, ensuring clear communication between design and development teams. All UI and motion design work was created in compliance with automotive industry standards, ISO guidelines, and HMI usability requirements.
Test phase
A one hour scenario based driving simulation was created in collaboration with a simulation company working with Ford.
To conduct a meaningful user test with stakeholders, the simulation setup was carefully planned. The simulation content was designed to focus on trust in the system and driver rest levels.


The scenario included:
- The driver was given a random route.
- The route included straight roads, heavy traffic, and challenging terrain areas.
- The driver was assigned specific tasks (e.g., rest, meals).
- A scoring system was developed for autonomous driving levels. The success rate was measured based on how much the system was used.
- To simulate real-life accident responsibility, the driver was instructed to ensure that the cargo in the truck remained undamaged.
- The cargo damage was programmed to increase based on harsh steering maneuvers and sudden braking. This discouraged drivers from freely using Level 3 autonomy simply because they were in a simulation environment.

On-road testing
After completing simulator studies, the interface was validated through on-road testing at Ford's proving ground. The objective was to evaluate driver comprehension, glance behaviour, and the clarity of autonomous driving status information within a realistic driving context. Findings from these sessions were used to iterate and improve the final HMI experience.
The work combined driver research, behavioral insights, and simulation-based validation to support confident and responsible use of Level 3 autonomy.
Back to Home


Ugur
Gokus
Home
Ford Trucks Guided Autonomous HMI
Level3+ Autonomous
Elektrobit EBGUIDE integration
Driver safety
Overview
Professional truck drivers often hesitate to use higher levels of autonomy, especially on unfamiliar routes. The challenge was not the lack of technology, but the lack of trust and predictability. I worked on the interaction design decisions around autonomy feedback, predictability, and driver trust calibration.The visuals and descriptions below have been presented in a generalized manner due to a Non-Disclosure Agreement (NDA).
FORD Fmax HMI
2021 - 2022
My Contribution
Design of UI & interaction animations, interface prototyping, user interviews, and user testing
Project Overview
This project aimed to develop the instrument panel display based on users' perceptions of safety and how displays behave in Level 3 and Level 3+ autonomous driving in Ford trucks.
Duration
12 months

Research
I participated in interviews with truck drivers alongside the Ford UX team in order to understand their driving habits, differences, and expectations. As a team, we identified specific assumptions and transformed them into targeted questions related to autonomous driving, allowing us to obtain accurate and meaningful insights.

Dashboard Interaction Development
Based on the insights gathered from drivers, I developed the dashboard information architecture around the drivers’ mental models and decision-making processes. In particular, I defined how the dashboard should behave across different ADAS levels and in edge-case scenarios, working closely with the autonomous driving engineering team.
UI development process
Collaborated closely with the Ford Brand team to design and evolve UI components within the design system, contributing new tokens, components, and visual patterns. Defined motion behaviors and animation specifications for autonomous driving states and vehicle status notifications, ensuring clear communication between design and development teams. All UI and motion design work was created in compliance with automotive industry standards, ISO guidelines, and HMI usability requirements.
Test phase
A one hour scenario based driving simulation was created in collaboration with a simulation company working with Ford.
To conduct a meaningful user test with stakeholders, the simulation setup was carefully planned. The simulation content was designed to focus on trust in the system and driver rest levels.
The scenario included:
- The driver was given a random route.
- The route included straight roads, heavy traffic, and challenging terrain areas.
- The driver was assigned specific tasks (e.g., rest, meals).
- A scoring system was developed for autonomous driving levels. The success rate was measured based on how much the system was used.
- To simulate real-life accident responsibility, the driver was instructed to ensure that the cargo in the truck remained undamaged.
- The cargo damage was programmed to increase based on harsh steering maneuvers and sudden braking. This discouraged drivers from freely using Level 3 autonomy simply because they were in a simulation environment.
On-road testing
After completing simulator studies, the interface was validated through on-road testing at Ford's proving ground. The objective was to evaluate driver comprehension, glance behaviour, and the clarity of autonomous driving status information within a realistic driving context. Findings from these sessions were used to iterate and improve the final HMI experience.
The work combined driver research, behavioral insights, and simulation-based validation to support confident and responsible use of Level 3 autonomy.
Back to Home

Ugur
Gokus
Home
Ford Trucks Guided Autonomous HMI
Level3+ Autonomous
Elektrobit EBGUIDE integration
Driver safety
Overview
Professional truck drivers often hesitate to use higher levels of autonomy, especially on unfamiliar routes. The challenge was not the lack of technology, but the lack of trust and predictability. I worked on the interaction design decisions around autonomy feedback, predictability, and driver trust calibration.The visuals and descriptions below have been presented in a generalized manner due to a Non-Disclosure Agreement (NDA).
FORD Fmax HMI
2021 - 2022
My Contribution
Expanded the dashboard design system, participated in user interviews and UX design processes, created interaction animations, and reported requirements and specifications to the engineering team.
Project Overview
This project aimed to develop the instrument panel display based on users' perceptions of safety and how displays behave in Level 3 and Level 3+ autonomous driving in Ford trucks.
Duration
12 months

Research
I participated in interviews with truck drivers alongside the Ford UX team in order to understand their driving habits, differences, and expectations. As a team, we identified specific assumptions and transformed them into targeted questions related to autonomous driving, allowing us to obtain accurate and meaningful insights.


Dashboard Interaction Development
Based on the insights gathered from drivers, I developed the dashboard information architecture around the drivers’ mental models and decision-making processes. In particular, I defined how the dashboard should behave across different ADAS levels and in edge-case scenarios, working closely with the autonomous driving engineering team.
UI development process
Collaborated closely with the Ford Brand team to design and evolve UI components within the design system, contributing new tokens, components, and visual patterns. Defined motion behaviors and animation specifications for autonomous driving states and vehicle status notifications, ensuring clear communication between design and development teams. All UI and motion design work was created in compliance with automotive industry standards, ISO guidelines, and HMI usability requirements.
Test phase
A one hour scenario based driving simulation was created in collaboration with a simulation company working with Ford.
To conduct a meaningful user test with stakeholders, the simulation setup was carefully planned. The simulation content was designed to focus on trust in the system and driver rest levels.
The scenario included:
- The driver was given a random route.
- The route included straight roads, heavy traffic, and challenging terrain areas.
- The driver was assigned specific tasks (e.g., rest, meals).
- A scoring system was developed for autonomous driving levels. The success rate was measured based on how much the system was used.
- To simulate real-life accident responsibility, the driver was instructed to ensure that the cargo in the truck remained undamaged.
- The cargo damage was programmed to increase based on harsh steering maneuvers and sudden braking. This discouraged drivers from freely using Level 3 autonomy simply because they were in a simulation environment.
On-road testing
After completing simulator studies, the interface was validated through on-road testing at Ford's proving ground. The objective was to evaluate driver comprehension, glance behaviour, and the clarity of autonomous driving status information within a realistic driving context. Findings from these sessions were used to iterate and improve the final HMI experience.
The work combined driver research, behavioral insights, and simulation-based validation to support confident and responsible use of Level 3 autonomy.
Back to Home